Command line
cars command line is the entry point for CARS to run 3D pipelines.
cars -h
usage: cars [-h] [--loglevel {DEBUG,INFO,PROGRESS,WARNING,ERROR,CRITICAL}] [--version] conf
CARS: CNES Algorithms to Reconstruct Surface
positional arguments:
conf Inputs Configuration File
optional arguments:
-h, --help show this help message and exit
--loglevel {DEBUG,INFO,PROGRESS,WARNING,ERROR,CRITICAL}
Logger level (default: PROGRESS. Should be one of (DEBUG, INFO, PROGRESS, WARNING, ERROR, CRITICAL)
--version, -v show program's version number and exit
CARS cli takes only one .json file as command line argument:
cars configfile.json
See Configuration to learn how to write configuration file.
An output used_conf.json file will be created on the output directory. This file contains all the execution used
parameters and can be used as an input configuration file to re-run cars.
Loglevel parameter
The loglevel option allows to parameter the loglevel. By default, the PROGRESS loglevel gives few information: only criticals, errors and warnings execution messages.
Note
Use cars configfile.json --loglevel INFO to get detailed information about each CARS step.
Inputs
Images and Geometric models
Images and associated geometric models are read by the OTB by default. Meaning:
every raster GDAL knows how to read can be given as CARS input
geometric models can either be part of the raster image (embedded RPC) or defined within a separate file (e.g. XML DIMAP).
Note
As far as the CNES is directly concerned, CARS has mainly be tested on the following official sensors’ products. Feel free to try different products and let us know of potential errors.
Pléiades (PHR)
Sport 6/7
WorldView 2/3
Note
Whenever possible we strongly recommend the use of separate files to reference the geometric models. Indeed, using embedded RPC will soon be obsolete.
CARS can also be used with optional Shareloc geometry library (replacing OTB ): please refer to Plugins section for details.
Optionally, one can provide CARS an additional raster that shall be projected onto the final DSM grid. This can be useful to create an ortho-image.
CARS also supports products Region Of Interest (ROI) created with otbcli_ExtractROI OTB application. See Frequently Asked Questions for details.
For more information, see Configuration.
Initial Input Digital Elevation Model
For now, CARS uses an initial input Digital Elevation Model (DEM) which is integrated in the stereo-rectification to minimize the disparity intervals to explore. Any geotiff file can be used.
For example, the SRTM data corresponding to the processed zone can be used through the otbcli_DownloadSRTMTiles OTB command.
The parameter is initial_elevation as seen in Configuration.
Masks
CARS can use a mask for each image in order to ignore some image regions (for instance water mask). This mask is taken into account during the whole 3D restitution process.
The masks have one band with 1 nbit and the non zeros values will be considered as invalid data and theses areas will not processed during the computation.
Please, see the section Convert image to binary image to make a binary image.
The masks are resampled with the resampling application.
The masked values are not used in the matching process (sparse or dense matching method) to avoid mismatch and useless processing.
Further, the sparse matching estimation of the disparity range can be enhanced with mask using for the water area typicaly.
Classification
The considered classification image are multi-band raster with descriptions name for each banda and 1 nbit per band. See optional description option of the Gdal band raster model
Please, see the section Convert image to binary image to make a multiband binary image with 1 bit per band.
All non-zeros values of the classification image will be considered as invalid data.
The classification can be used in each application by band name list selection parameter. See application classification parameter Configuration..
Outputs
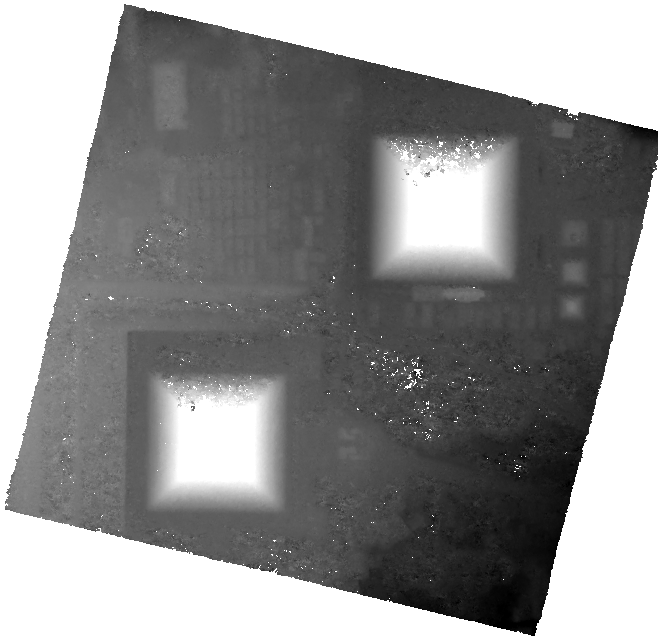
CARS produces a geotiff file named dsm.tif that contains the Digital Surface Model in the required cartographic projection and the ground sampling distance defined by the user.
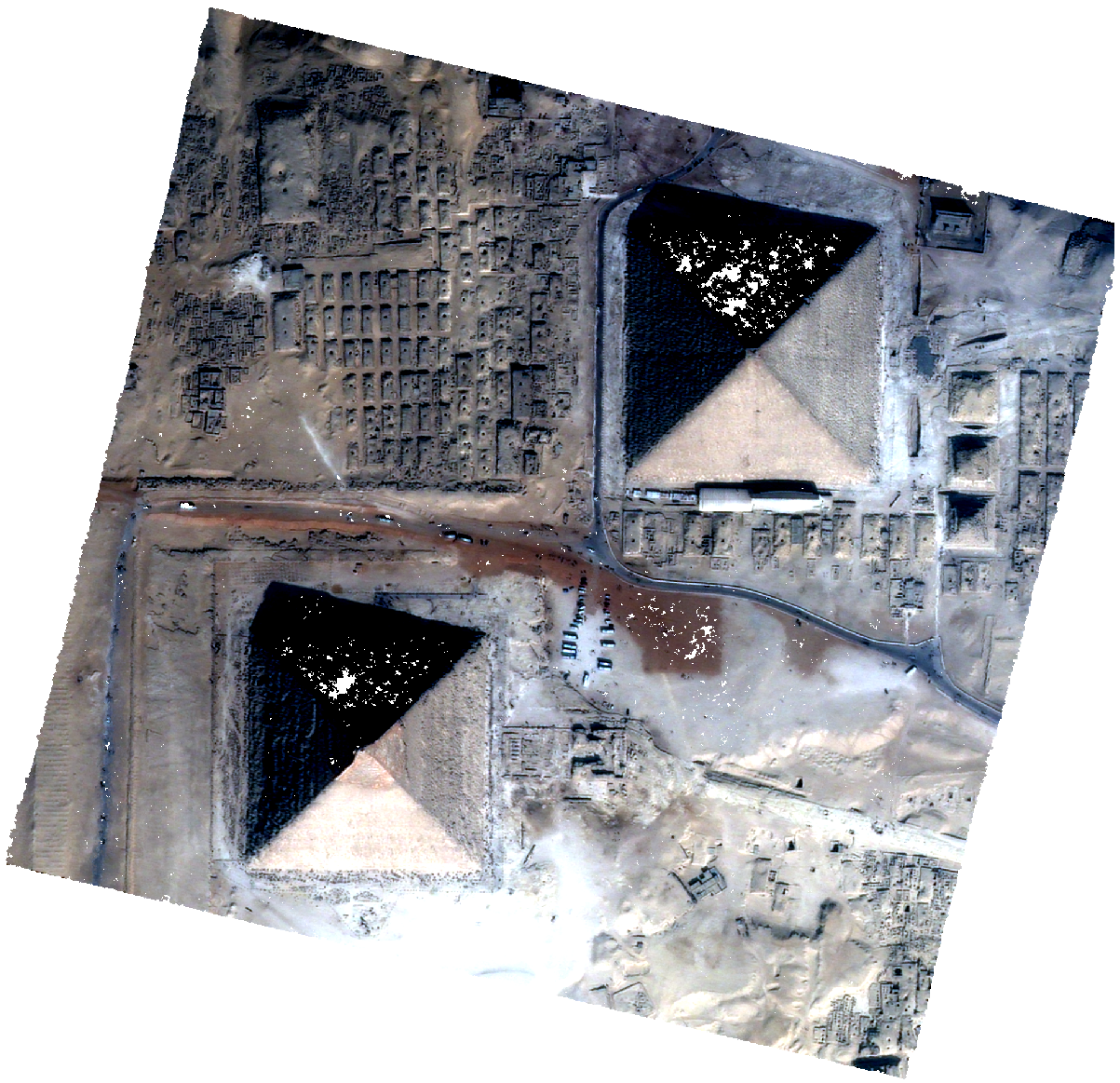
If the user provides an additional input image, an ortho-image clr.tif is also produced. The latter is stackable to the DSM (See Getting Started).
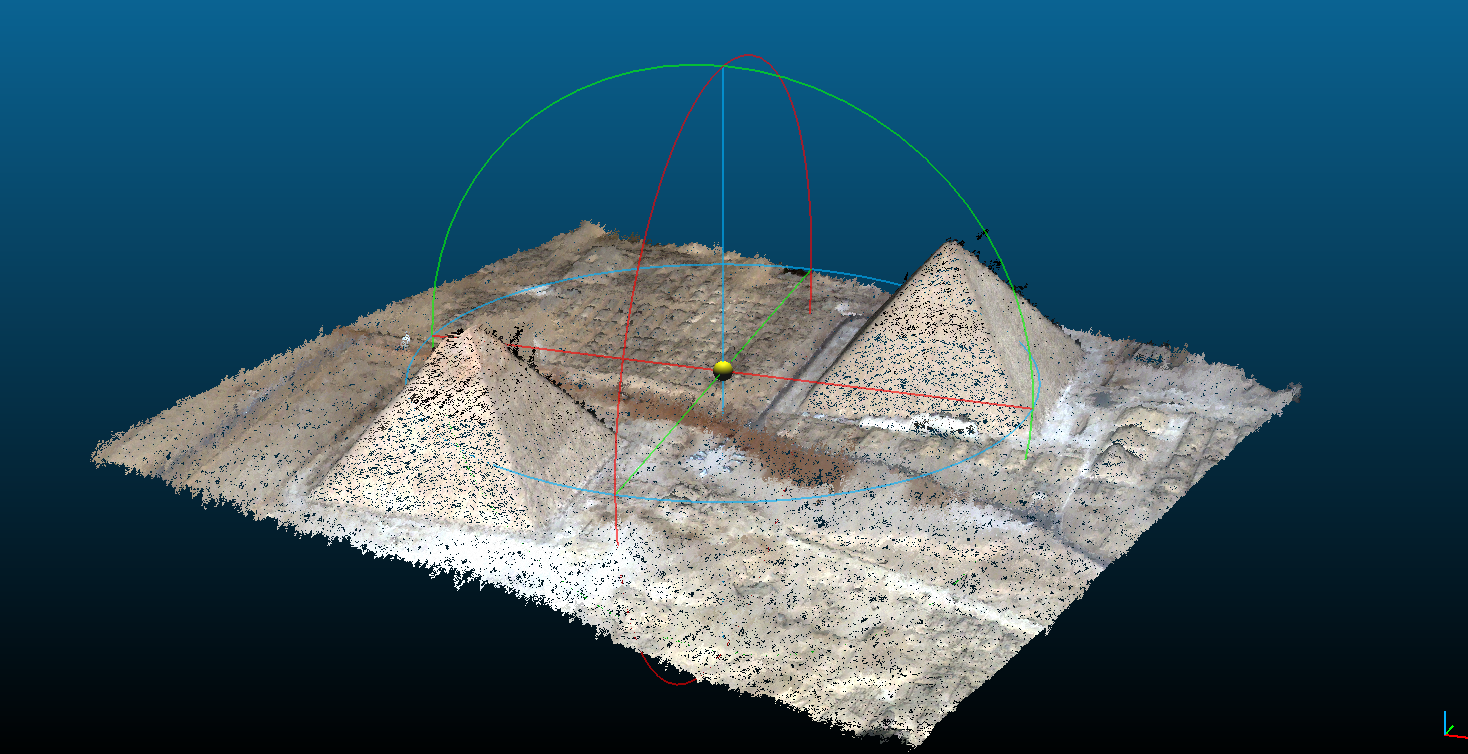
If the user saves points clouds as laz format (point_cloud_fusion, point_cloud_outliers_removing, point_cloud_rasterization), the points clouds are saved in laz compressed format with colors or graylevel image.
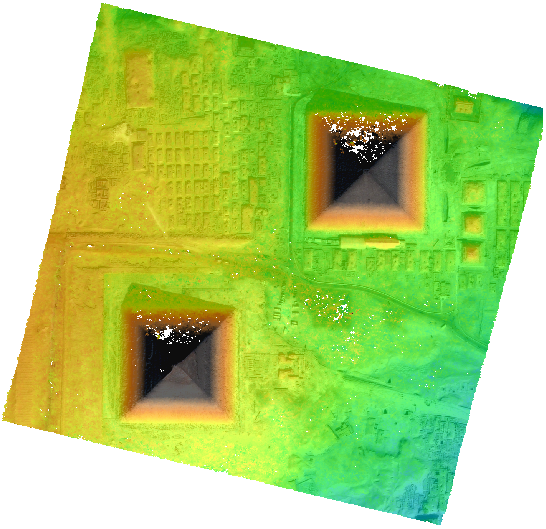
These two products can be visualized with QGIS for example.
dsm.tif |
clr.tif |
QGIS Mix |
cloudcompare |
|
|
|
|
Simple example
A simple json file with only required configuration:
{
"inputs": {
"sensors" : {
"one": {
"image": "img1.tif",
"geomodel": "img1.geom"
},
"two": {
"image": "img2.tif",
"geomodel": "img2.geom"
}
},
"pairing": [["one", "two"]]
},
"output": {
"out_dir": "outresults"
}
}
Launch CARS with configuration file
cars configfile.json