Technical Foundations
Satellite photogrammetry in a nutshell
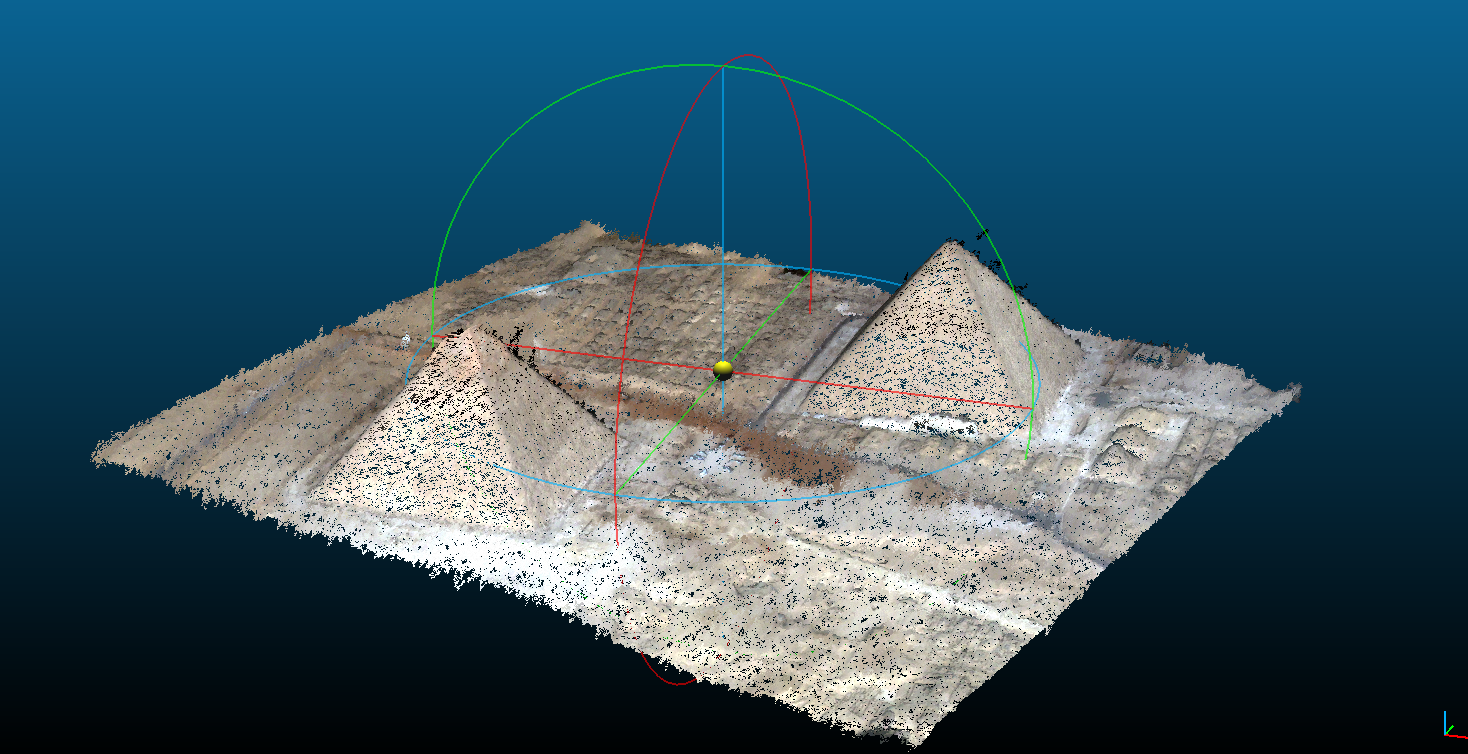
As its name suggests, satellite photogrammetry works using optical satellite acquisitions to generate a Digital Surface Model (DSM), the 2.5D representation created from observed surface altitude data. We speak of 2.5D because the digital surface model is an array of pixels (raster, 2D) where each pixel (x,y) corresponds to an altitude (z).
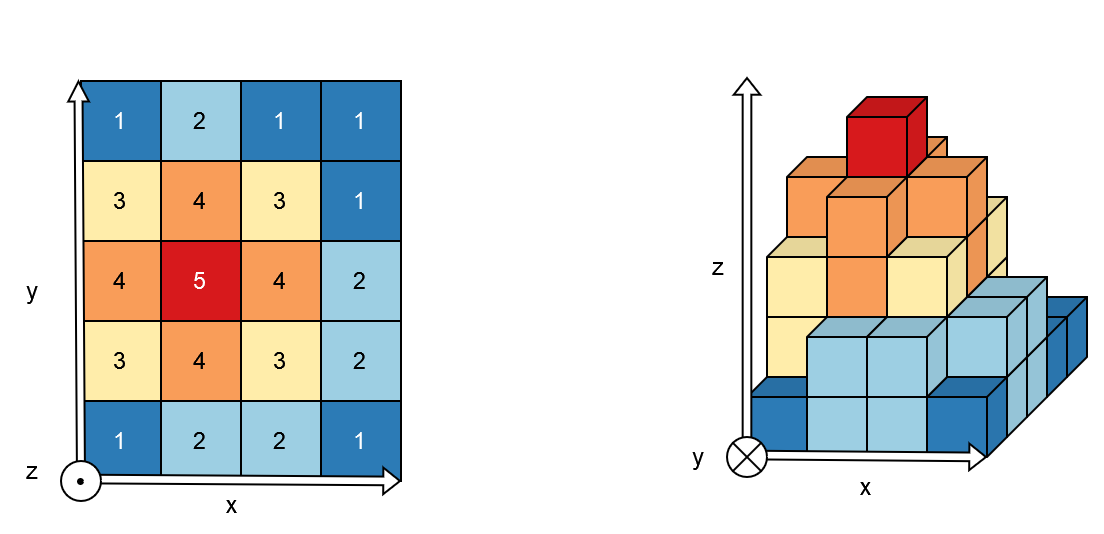
Fig. 1 2.5D representation
On the left, an example of an array of pixels, and on the right, a volume representation of altitude values.
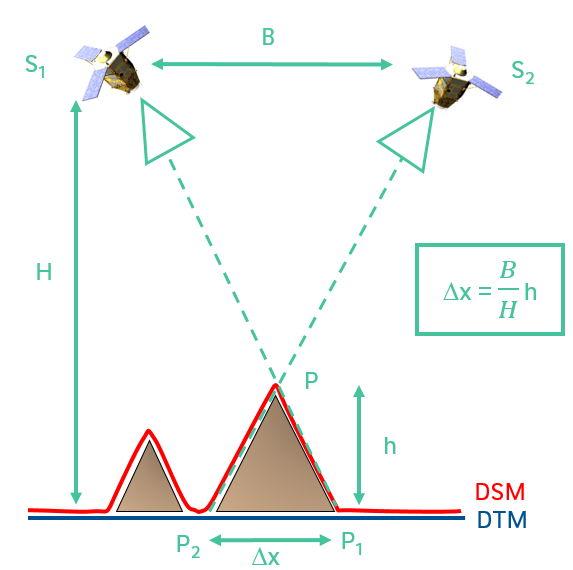
Like our eyes, altitude (or depth relative to the satellite, to continue the analogy) is determined from the observed pixels displacement. We therefore need at least two images, acquired from two different viewpoints. This difference in viewpoints between two satellites is quantified by the B over H ratio where B is the distance between the two satellites and H is their altitude.
B over H ratio |
Two viewpoints |
|
|

Every raster readable by GDAL can be given as CARS input. In addition to images, the photogrammetric process requires geometric models. Rational Polynomial Coefficients (RPC) provide a compact representation of a ground-to-image geometry giving a relationship between:
Image coordinates + altitude and ground coordinates (direct model: image to ground)
Ground coordinates + altitude and image coordinates (inverse model: ground to image)
These coefficients are classically contained in the RPC*.XML files.
From Satellite Images to Digital Surface Model
Generate a DSM step by step
Pipeline |
Resampling |
|
|


Pipeline |
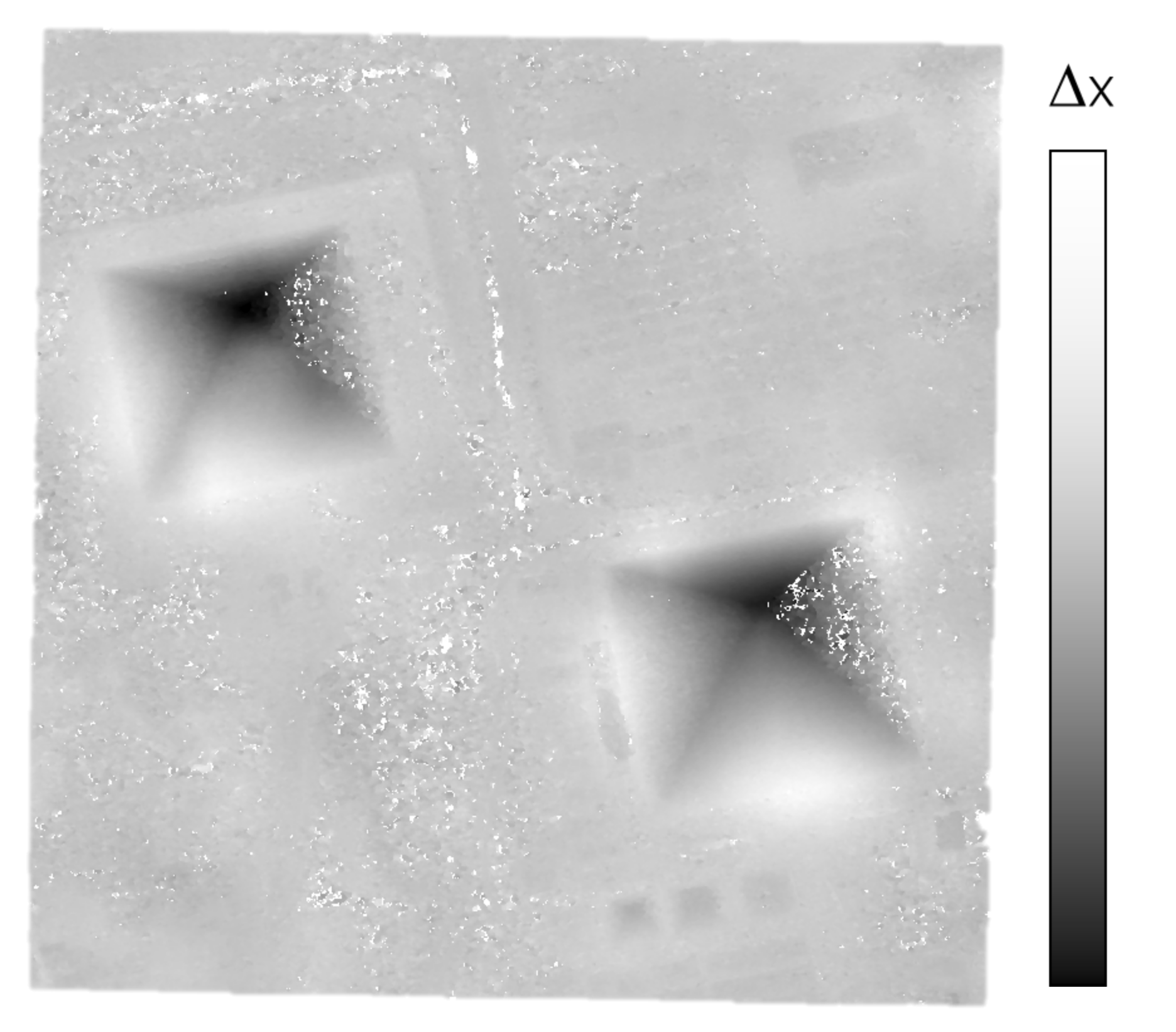
Matching |
|
|


Pipeline |
Triangulation |
|
|

To obtain a raster image, the final process projects each point into a 2D grid: altitudes and colors (see below).
Pipeline |
Rasterization |
|
|


Altimetric exploration at multiple resolutions
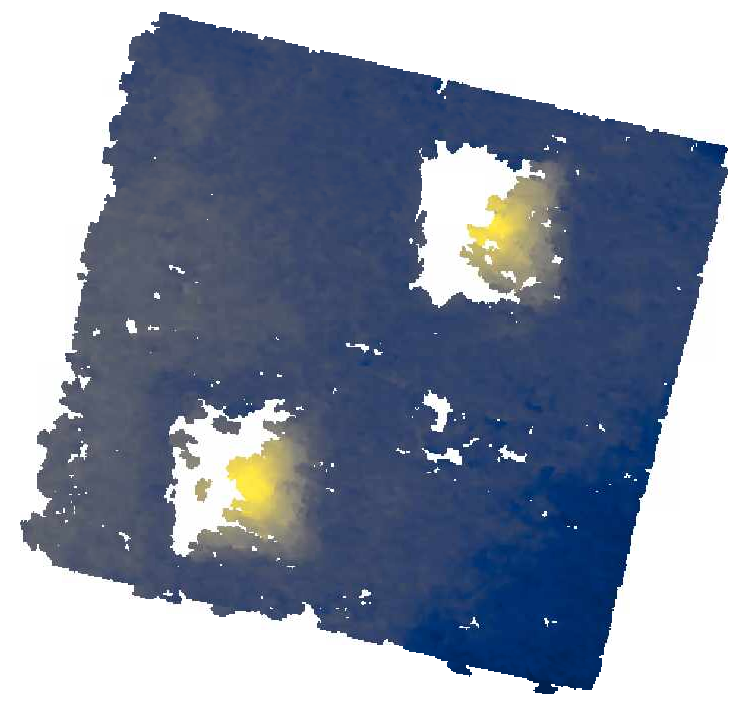
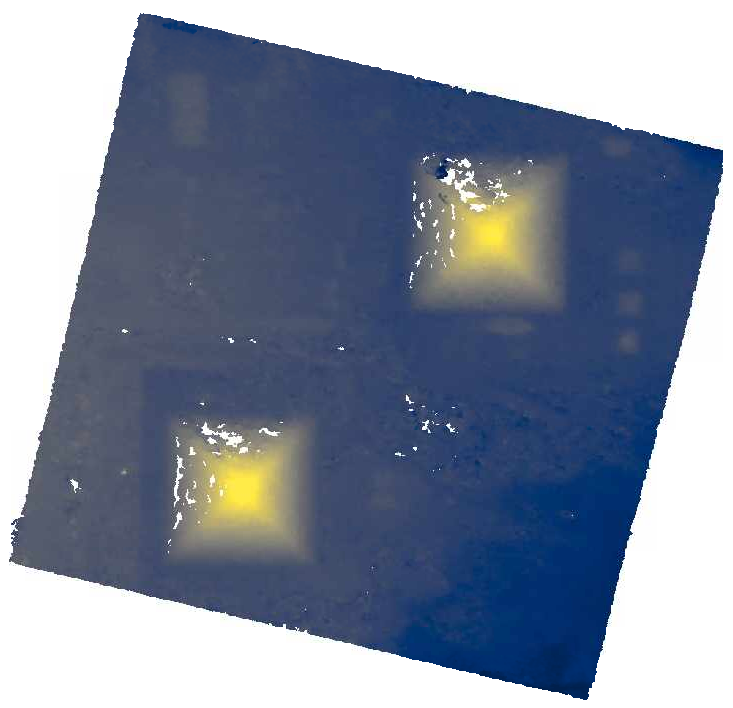
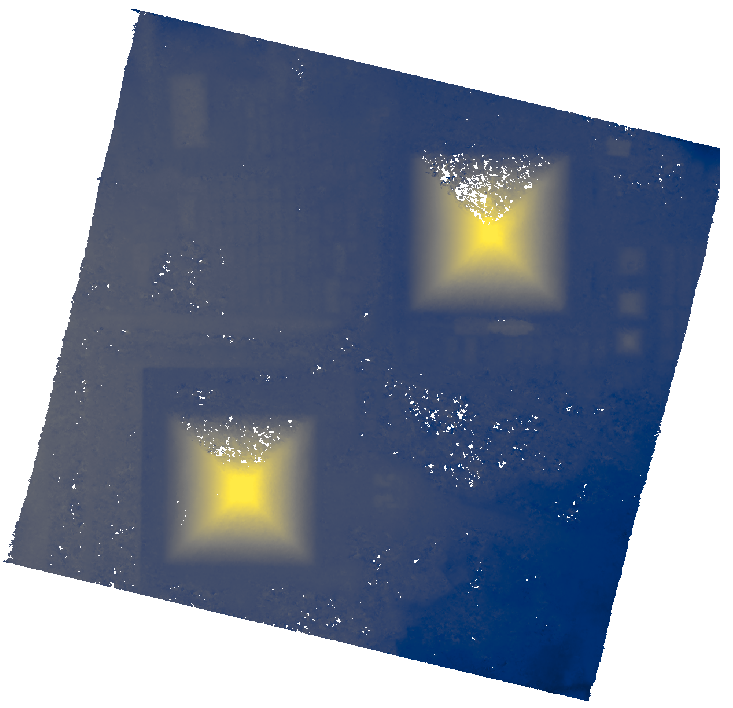
To reduce the search interval (i.e. altimetric exploration) in the dense matching step and thus save computing time, CARS’s pipeline runs the dense matching algorithm and surrounding applications at multiple resolutions, going from a very low resolution to the highest. Each time, based on the previous resolution, the disparity interval searched will be reduced.
This reduces computation time greatly while providing better results than a bruteforce approach.
DSM at resolution 4 |
DSM at resolution 2 |
DSM at resolution 1 |
|
|
|
With :
resolution 4 corresponding to 4 times the original resolution (e.g., 4m if the original resolution is 1m).
Resolution 2 corresponding to 2 times the original resolution (e.g., 2m if the original resolution is 1m).
Resolution 1 corresponding to the original resolution (e.g., 1m).
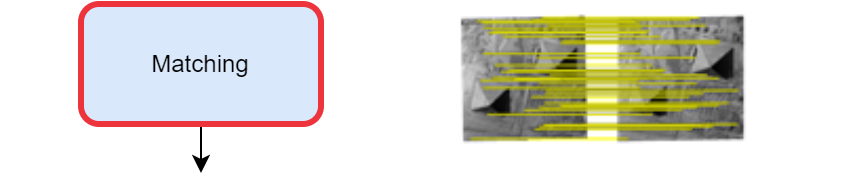
Geometric inaccuracies
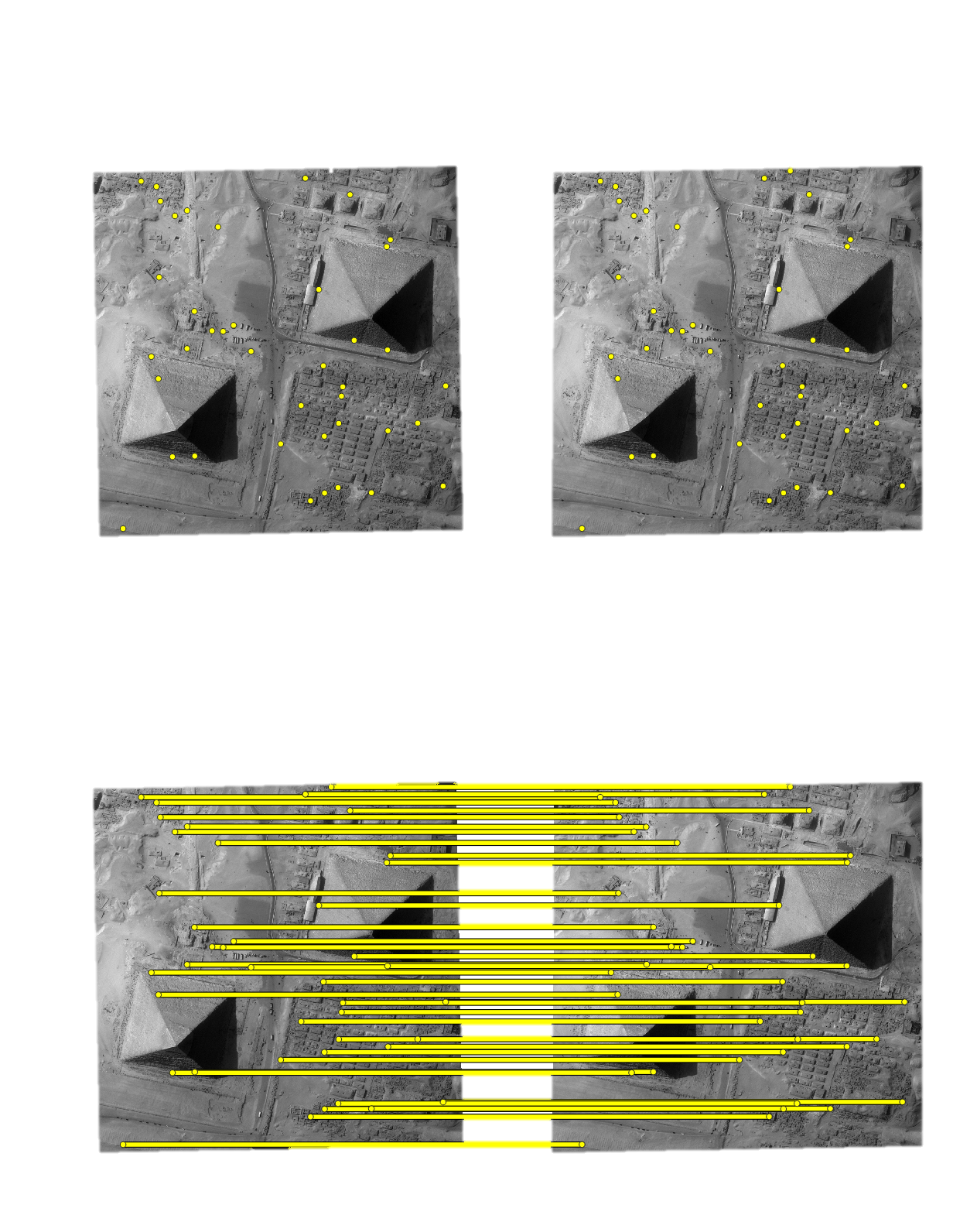
To reduce geometric errors present in the sensor images’ geometry model, a sparse matching step is performed on the full-resolution images in 2D. These matches are then used to correct geometric errors in the geometry model, ensuring that the epipolar geometry is correct, in turn allowing for better results.
Those matches will also be used to reduce the disparity interval searched in the pipeline’s first resolution run.
This sparse matching step is performed with keypoints, like SIFT to ensure that the matches found are accurate, as inaccurate ones may result in distortions and bad dense matching results. (SIFT Article:).
Pipeline |
Matching (sparse) |
|
|


3D products
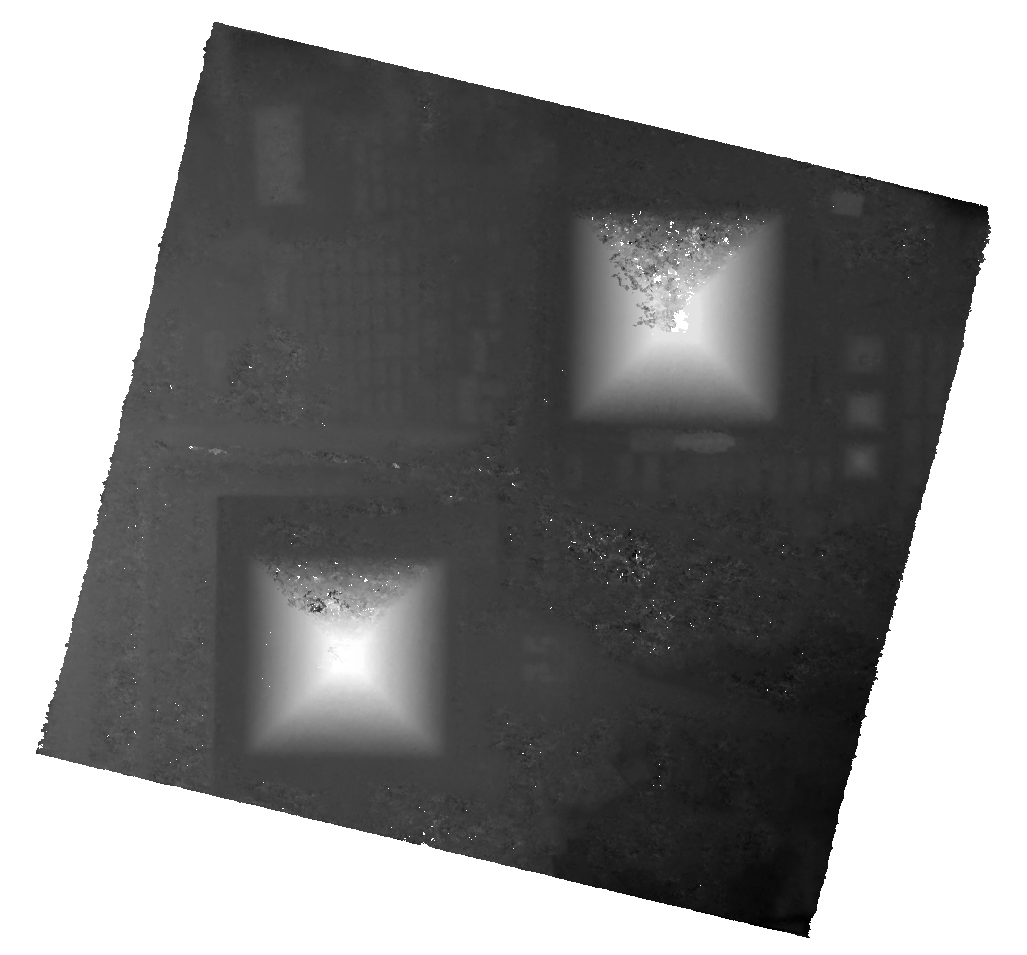
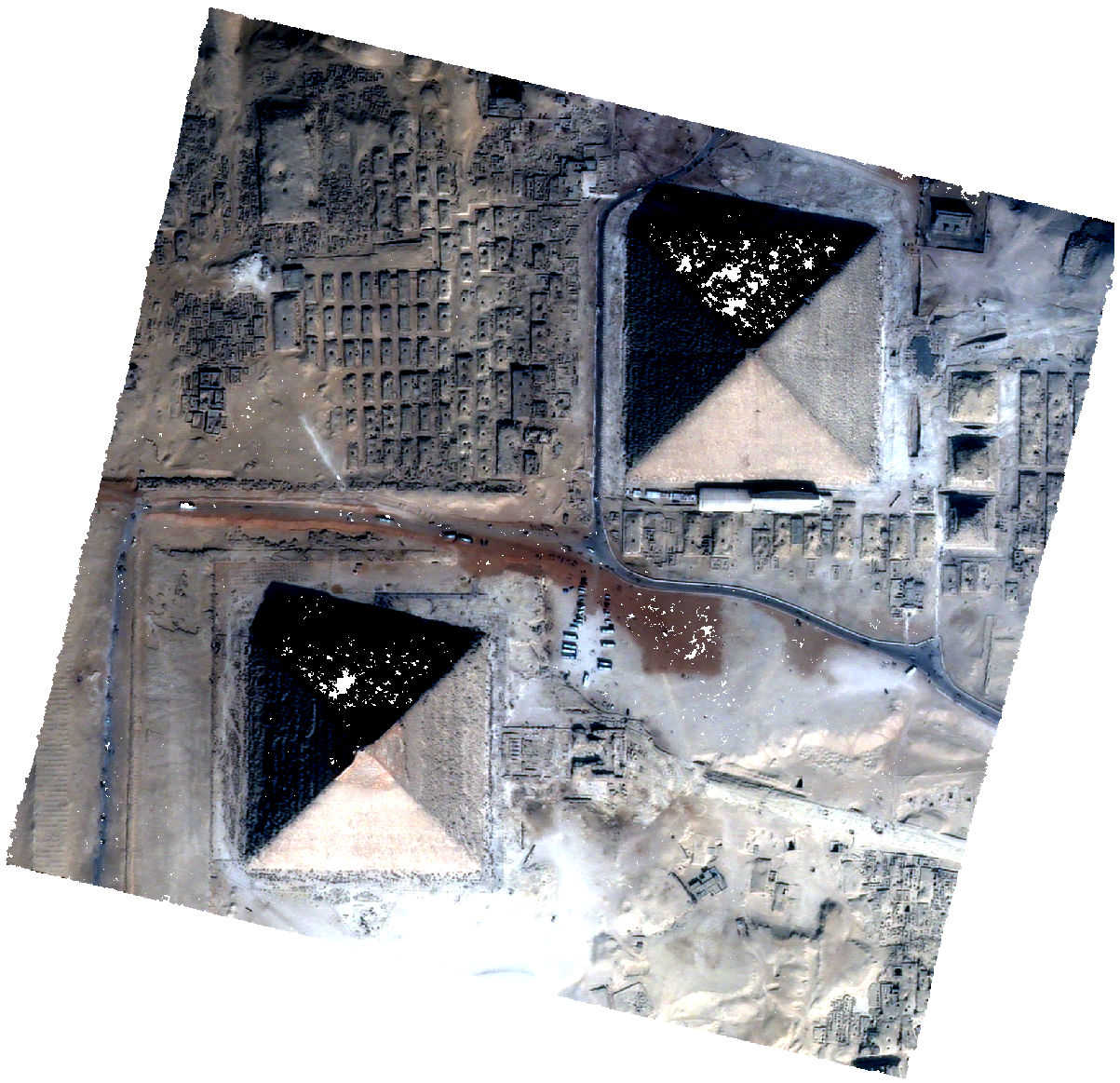
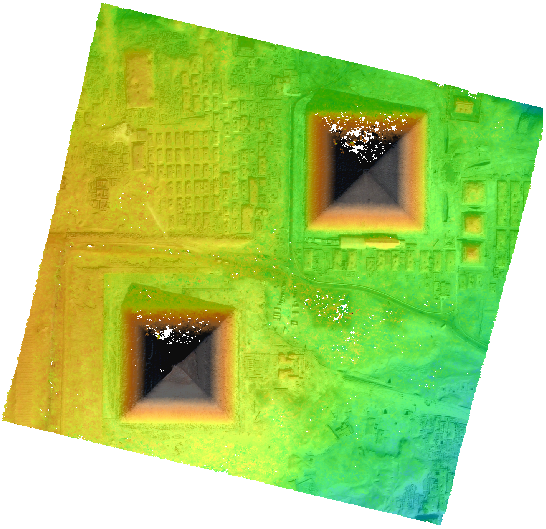
dsm.tif that contains the Digital Surface Model in the required cartographic projection and the ground sampling distance defined by the user.image.tif is also produced from the first (left) sensor image of each pair. The latter is stackable to the DSM (See Quick start).These two products can be visualized with QGIS for example.
dsm.tif |
image.tif |
QGIS Mix |
cloudcompare |
|
|
|
|
Pipeline overview
To summarize, CARS’s default pipeline is organized into sequential steps, starting from input pairs (and metadata) and producing output data. Each step is performed tile-wise and distributed among workers. Part of the pipeline operates at multiple spatial resolutions to reach the final results while minimizing computation time. It is possible to run CARS at a single resolution, but this may be very inefficient for large or medium size images.
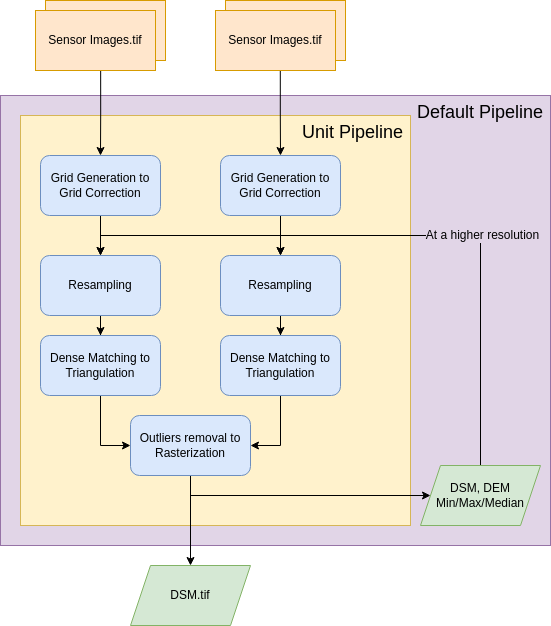
The pipeline will perform the following steps [Michel J. et al, 2020] [Youssefi D. et al, 2020]:
For each stereo pair:
Create stereo-rectification grids for left and right views.
Resample both images into epipolar geometry.
Compute sift matches between left and right views in epipolar geometry.
Create a bilinear correction model of the right image’s stereo-rectification grid in order to minimize the epipolar error. Apply the estimated correction to the right grid.
For each resolution (first_resolution, intermediate_resolution, last_resolution)
For each stereo pair:
Resample the stereo pair in epipolar geometry, at the specified resolution using:
The input DTM (such as an SRTM) for the first resolution.
The DEM Median from the previous resolution for intermediate_resolution or last_resolution.
Compute the disparity map in epipolar geometry, by using the DEM Min and DEM Max as disparity intervals. For the first resolution, sift features are used to refine the disparity intervals.
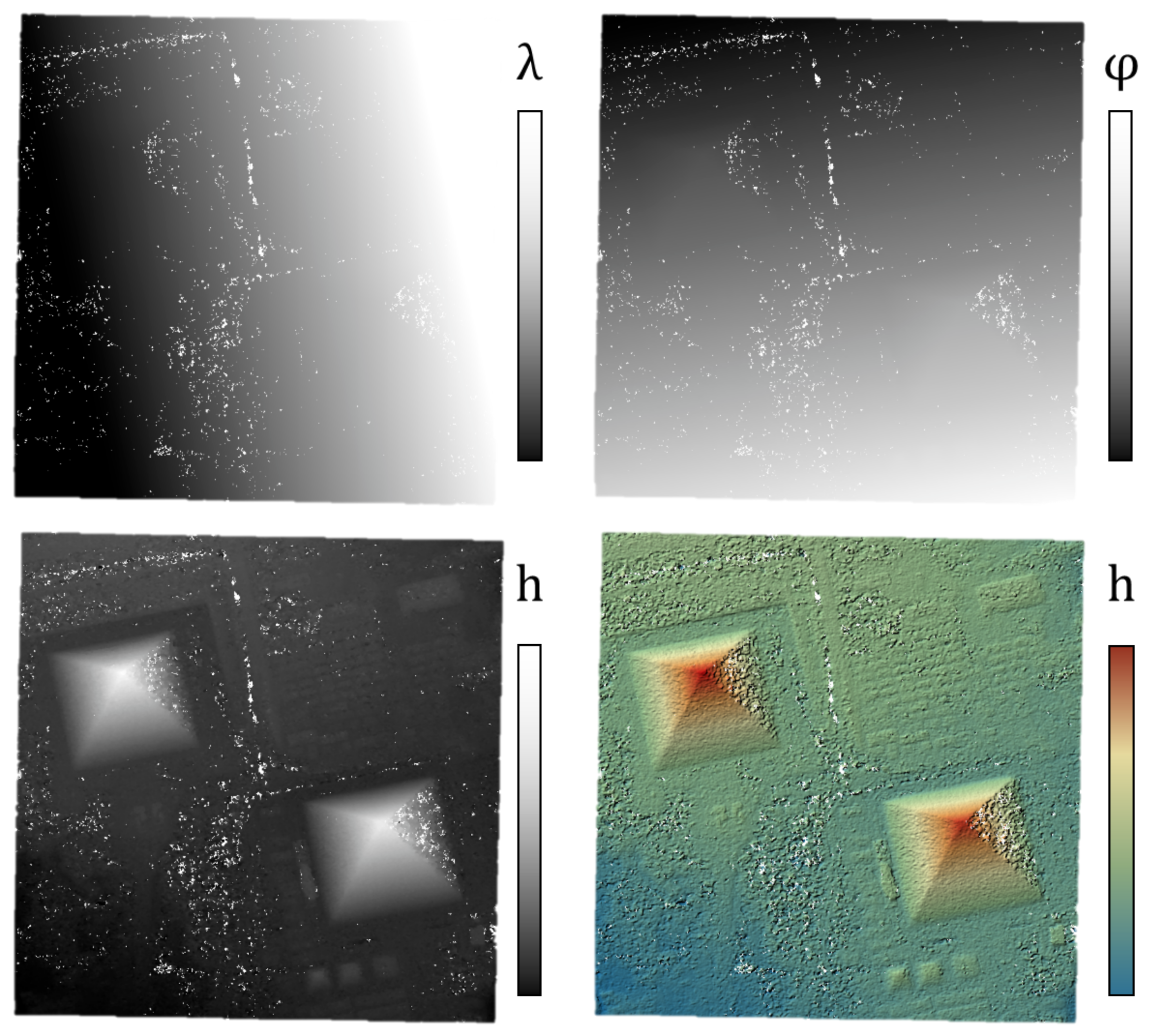
Triangulate the matches and get for each pixel of the reference image a latitude, longitude and altitude coordinate.
Then
Merge points clouds coming from each stereo pairs.
Filter the resulting 3D points cloud via two consecutive filters: the first removes the small groups of 3D points, the second filters the points which have the most scattered neighbors.
Rasterize: Project these altitudes on a regular grid to create a DSM and its associated color, as well as (if not at the last resolution) DEM Min/Max/Median.